 EN
EN大型光伏电站清扫机器人的场景化选型指南
大型光伏电站选择光伏清扫机器人时,需从清洁效率、环境适应性、安全防护、智能化水平及长期成本效益等多维度综合考量,以匹配电站规模大、组件排列复杂、运维需求高的特点。
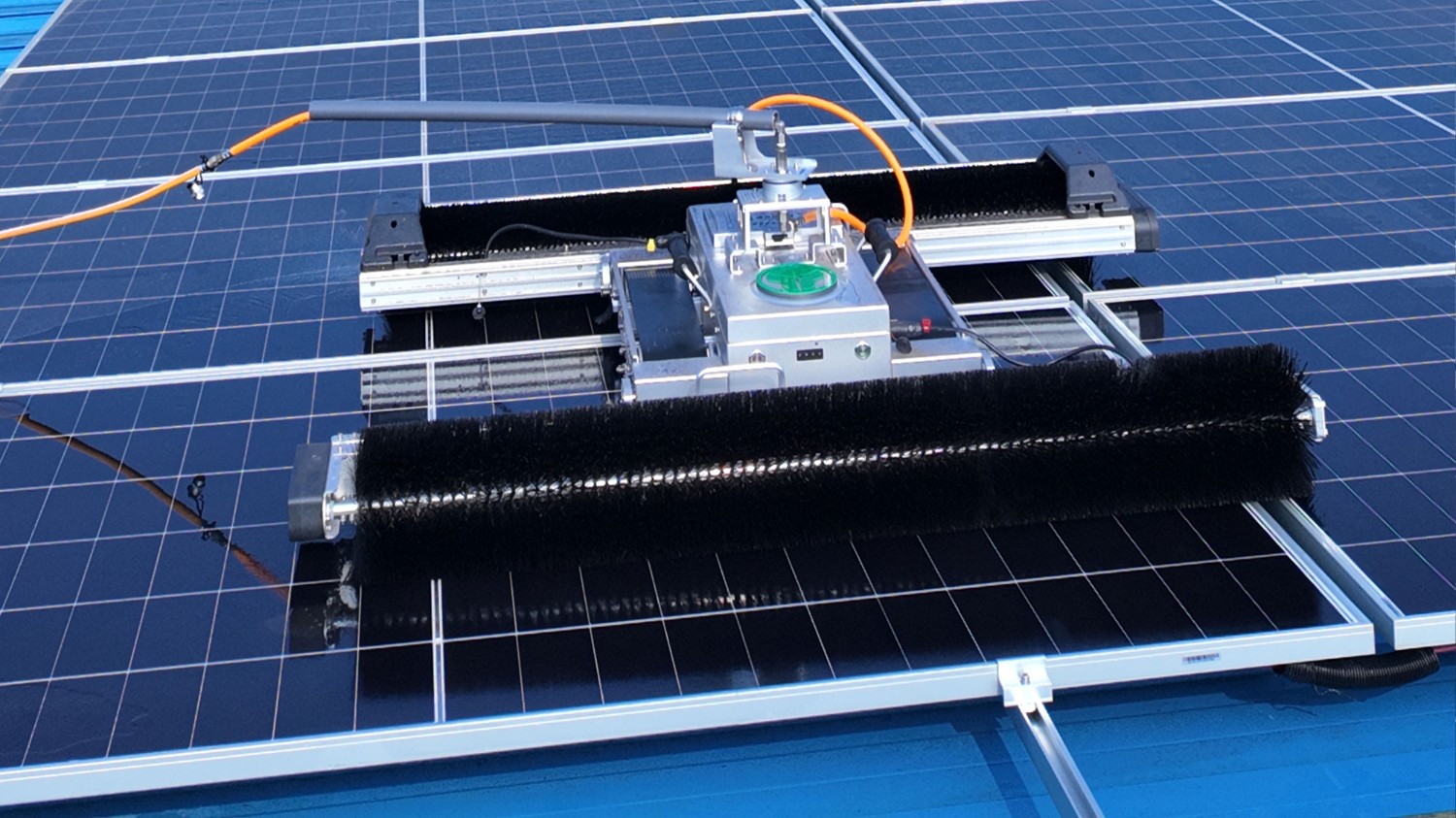
轨道式机器人凭借沿光伏板边框轨道移动的特性,成为大型地面电站的选择。其清洁路径误差极小,可覆盖组件表面每一处区域,尤其适合组件排列规则、地形平坦的场景。轨道系统支持跨排作业,清洁效率显著提升,且能通过转运车扩展至多排组件清洗,减少人工干预。此外,轨道式机器人对环境耐受性强,无论是西北地区的温差,还是潮湿或沙尘环境,均能稳定运行,确保长期清洁效果。

自走式机器人则以灵活性和地形适应性见长,尤其适用于沙漠、山地等复杂地形。其履带或轮式底盘结合自主导航技术,可攀爬大坡度斜坡,在松软沙地或崎岖地形中保持稳定行驶。自走式机器人通常配备高精度刷具和空气动力系统,能彻底清理顽固污垢,同时自供电系统支持全天候作业,无需外部电源接入。部分机型还具备垂直越障能力,可适应不同坡度的屋顶或地面,进一步扩大应用范围。
在清洁效果方面,机器人需具备清洁能力。采用“前刷剥离+后水刮净”双段式清洁的机型,可先通过刷具剥离灰尘和污垢,再利用水刮或空气动力系统彻底清理残留,确保光伏板表面透光率大幅提升,从而恢复发电效率。此外,机器人的刷具材质需柔软且耐用,避免划伤组件表面,同时吸尘装置或水循环系统可减少扬尘或水资源浪费,符合绿色运维理念。
安全防护是选择机器人的关键指标。机器人需配备防跌落系统,通过双重倾角传感器和紧急刹车功能,实时识别光伏板边缘空白区域,防止坠落损失。同时,机身设计需考虑防水防尘性能,IP65级或更高防护等级的机型可应对暴雨、风沙等恶劣天气,确保设备在环境下稳定运行。此外,机器人的电气系统需具备过载保护、短路断电等功能,避免因故障引发安全隐患。
智能化水平直接影响运维效率。机器人应支持智能路径规划,通过激光雷达、视觉摄像头或GPS模块实时扫描环境,结合AI算法动态调整清洁路线,避免重复清扫或遗漏区域。远程监控功能可让运维人员通过移动端或云端实时查看工作状态、清洁效果及设备温度,提前发现故障隐患。部分机型还具备故障自诊断能力,可自动报警并提示维护方案,减少停机时间。
操作便捷性同样重要。机器人需采用模块化设计,便于快速组装和拆卸,尤其适合分布式屋顶电站或空间有限的场景。例如,机身可拆分为多个独立模块,单件重量较轻,两名运维人员即可在短时间内完成组装。遥控器性能也需可靠,续航时间长、抗干扰能力强,确保在复杂环境中信号稳定传输,避免作业中断。
从长期成本效益看,机器人方案虽初期投入较高,但全生命周期收益显著。定期清洁可使发电效率提高,组件寿命延长,减少因污垢积累导致的发电量损失。同时,机器人可替代大量人工,降低人力成本,尤其在大型电站中,运维效率提升和成本降低的效应更为明显。此外,机器人的耐用性也需考虑,核心部件如电机、电池等应具备长寿命和低维护特性,进一步降低长期运营成本。
大型光伏电站选择光伏清扫机器人时,应优先选择轨道式、自走式或协作型机器人,结合电站地形、清洁需求和预算综合评估。重点考察机器人的清洁效率、环境适应性、安全防护、智能化水平及操作便捷性,确保设备能长期稳定运行,为电站带来持续的经济效益。






