 EN
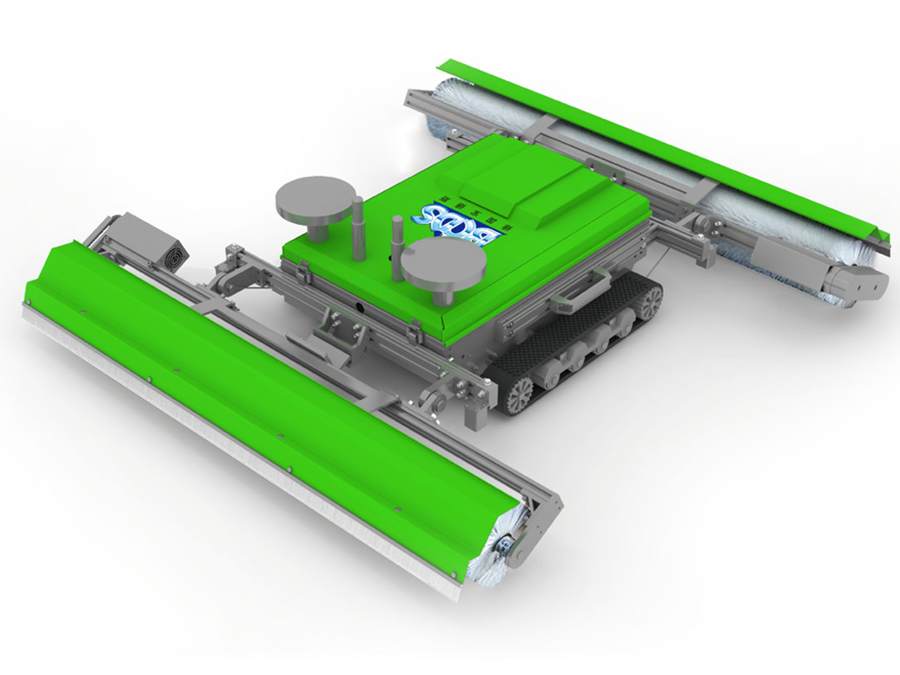
EN在分布式光伏电站与特殊地形光伏项目的运维中,履带式光伏清洁机器人凭借其独特的设计逻辑与智能化能力,成为突破清洁效率瓶颈的核心工具。这类机器人以“轻量化结构+高适应性行走系统+智能清洁模块”为技术基底,专为屋顶、山地、渔光互补等复杂场景开发,通过物理形态与算法的深度融合,实现了清洁作业从“人力依赖”到“无人化”的跨越。

选型逻辑:清洁力、稳定性与智能化的三角平衡
在选择履带式光伏清洁机器人时,需围绕清洁能力、地形适应性与智能化水平构建评估体系。清洁能力方面,需关注清洗系统配置(如双滚刷、高压水射流)、清洁效率(800-1200㎡/h)与效果稳定性(如藻类清理率95%以上)。例如,针对顽固污渍(鸟粪、苔藓),优先选择支持干湿两用模式的机型,其特制清洁液喷洒功能可软化污渍,再由滚刷清理,效率较单一模式提升3倍。
地形适应性是履带式机器人的核心优势,但不同场景对履带宽度、悬挂行程与越障高度的要求各异。例如,高湿度环境需选择防护等级不低于IP65的机型,避免电路短路;渔光互补项目则需确认机身是否搭载污水回收系统,防止二次污染。智能化水平直接影响运维成本,优先支持手机APP/WEB远程控制、实时监控与清洁报告生成的机型,可降低人工干预频率;具备自动巡航、云端数据管理(如清洁数据上传、分析)功能的机器人,则能进一步提升电站管理效率。
安全性是选型的底线要求。机身需搭载超声波雷达与气象站,实现边缘防跌落与大风天气自主回巢;针对渔光互补项目,还需确认污水回收系统的密封性,避免泄漏污染水域。例如,某品牌机器人在机身四周布置超声波传感器,可实时检测障碍物,当检测到边缘或障碍物时,自动减速并调整路径,确保作业安全。
从屋顶到山地,从陆地到水域,履带式光伏清洁机器人正以“技术适配场景”的逻辑,重新定义光伏运维的边界。随着AI算法、材料科学与传感器技术的持续进化,未来机器人将进一步融合故障预测、发电优化等功能,推动光伏产业向“无人值守、自感知、自决策”的智能运维新形态迈进。






